A joint research team from The Chinese University of Hong Kong (CUHK) and The University of Hong Kong (HKU) has recently developed a soft robotic manipulator for transoral laser microsurgery on head and neck cancer, guided by intra-operative magnetic resonance (MR) imaging (MRI). Researchers from the Department of Otorhinolaryngology, Head and Neck Surgery, Faculty of Medicine, CUHK (CU Medicine), together with the Department of Mechanical Engineering, Faculty of Engineering, and the Faculty of Dentistry, both from HKU, collaborated to develop this novel MR-safe system in miniature size, with compliant architecture and five degrees of freedom, which enables safe and dexterous laser ablation within the confined spaces of the oral and pharyngeal cavities. Ex-vivo tissue ablation and a cadaveric head-and-neck trial were carried out under MRI, demonstrating that the system can utilise MR thermometry to precisely monitor the tissue ablation margin and thermal diffusion during the procedure. This innovation has just been reported in the international journal Science Robotics.
Challenges in applying MRI-guided laser ablative therapy to transoral microsurgery
Head and neck cancer generally refers to cancers in areas including the oral cavity, laryngopharynx, nasopharynx and nasal cavity. It is the seventh most common cancer in the world causing 450,000 deaths every year.
Laser ablative therapy has been used for treating head and neck cancers. However, the conventional treatment system remains challenging at times in treating oropharyngeal and laryngeal tumours, which requires extreme positioning including retraction of the tongue, opening of the mouth and/or extension of the neck of patients to achieve adequate tumour exposure for laser delivery. Meanwhile, laser-based tumour ablation stands to benefit greatly from MRI guidance as 3D ablation margins alongside thermal distributions can be evaluated in real time to protect critical neurovascular structures as well as to ensure adequate ablation margins. But to apply transoral laser microsurgery in an MRI environment, there are substantial challenges in the confines of the MRI bore and its strong magnetic field (1.5/3T), where conventional metallic robot components cannot be applied.
Features of the novel soft robotic system
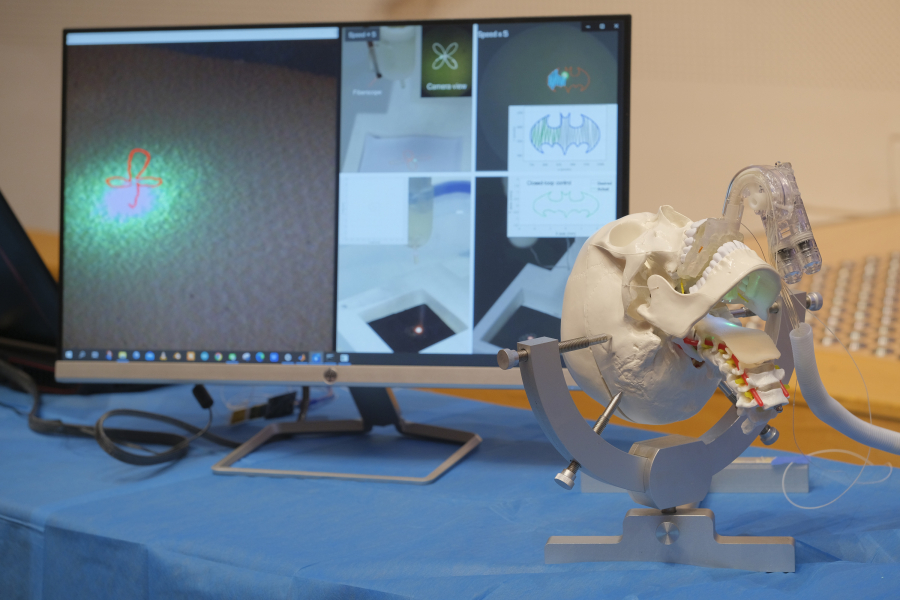
Through close collaboration between clinicians and engineers, the team developed an MR-safe soft robotic system. It is a novel robotic platform that is able to use real-time intra-operative MRI guidance together with continuous control of laser beam projection for tumour ablation. The robot integrated with a laser fibre enables endoscopic intervention through a patient-specific dental anchorage in the oral cavity, and directs energy delivery to the target lesion. MRI-guided transoral laser microsurgery can be performed by the system which has the following unique features:
- It is compact (size: diameter 12mm x length 100mm) and lightweight (~200g), providing five degrees of freedom for motions. The larger actuator systems can be housed outside of the MRI suite.
- A hydraulic actuation approach is taken for its intrinsic MR compatibility while the system is fabricated with MR-safe materials.
- The laser manipulator incorporates hybrid soft and hard structures for laser steering with enhanced stiffness and lowered hysteresis.
- The system generates zero electromagnetic interference, allowing the introduction of intra-operative MRI guidance to evaluate the laser and tissue interaction process. This is essential in balancing adequate tumour resection and functional preservation. During laser ablation, MR thermal imaging can also be conducted to evaluate the heat diffusion in tissue, thus offering real-time monitoring of the ablation margin.
- A learning-based controller is used to accommodate the inherent nonlinear robot actuation and is validated with laser path following tests with a mean tracking error <200μm.
Experimental validation of intra-operative MRI-guided robotic laser ablation on ex-vivo tissue and cadaveric oropharyngeal tissue was carried out. The results showed that the robot achieved precision in an automated path following the laser spot along a trajectory defined by the surgeon.
Dr. Jason Ying Kuen CHAN, Associate Professor, Department of Otorhinolaryngology, Head and Neck Surgery at CU Medicine, stated, “The system enabled direct exposure of the ablation laser to the target lesion, without the need for positioning patients with extreme neck extension to accommodate rigid laser micromanipulators. Together with MRI guidance, clinicians could give intuitive and precise feedback of the ablation process, which is critical for function preservation of surrounding structures.”
For future work, the team is planning to further reduce the robot size. Dr. Ka Wai KWOK, Associate Professor, Department of Mechanical Engineering, Faculty of Engineering at HKU, added, “By miniaturising its size, it will be possible for the robot to access more confined sites such as the nasal cavity and sinus cavity. We will also implement some specific image sequences so that the images can be fed back to the robot in a faster way."
Other collaborators in this project included the Department of Diagnostic Radiology at HKU, the Division of Neurosurgery at the Prince of Wales Hospital, the Department of Mechanical and Automation Engineering at CUHK and the Division of Head and Neck Surgery at the Stanford University Medical Center.
Media Enquiries:
Ms. Jackie Chan, Assistant Communications Manager, Faculty of Medicine, CUHK (Tel: 3505 4375)